

If you’re in surveying, engineering, construction or any other market that uses geospatial data, you’ve probably heard a lot about “mobile mapping” lately.
It will save you time! And money!
But, as with any technology, it’s important to talk about definitions. What exactly is a “mobile mapping system”? What are its component parts? And why would you want to use a mobile mapping system, anyway?
The most basic definition of mobile mapping is pretty straightforward: It’s any group of technologies that allows you to map an environment while in motion. To do that, the system needs sensors that record three pieces of information simultaneously and continuously: Where, when, and what.
For the purpose of this article, we’ll focus on vehicle-based platforms (although it’s important to note that the most flexible of these systems can be used on ATVs, railcars or boats as well as trucks and cars). To dive further into what makes a true mobile mapping system (we’ll call it an MMS for short), let’s look at each of the three component parts: an ability to place a data point (“what”) at a specific time (“when”) and place (“where”).
Where
The first and generally most important function of an MMS is to determine where we are, or our position. The easiest way to determine our position with x, y, and z coordinates is by utilizing GPS (the Global Positioning System). This technology has been consumer-accessible for nearly 30 years and is now commonplace, to the point where most of you probably have access to it via the phone in your pocket. These types of GPS sensors typically yield positional accuracies to within about 1 meter.
 “Working together, a GNSS sensor and an IMU are a very effective combination in determining an accurate record of where we are and our movement through space.”
“Working together, a GNSS sensor and an IMU are a very effective combination in determining an accurate record of where we are and our movement through space.”
Beyond consumer or even mapping-grade GPS, advanced GNSS (the Global Navigation Satellite System) solutions can utilize multiple satellite constellations at once, such as GPS, GLONASS, Bediou and Galileo, providing positional redundancy and ultimately improving the quality of positional observations. These systems operate on multiple frequencies at once, providing redundancy and richness to positional data. Observations from these varying satellite networks can be further improved by correcting them from a ground-based, static GPS antenna, commonly referred to as a “base station.” Positions from this type of correction can result in sub-centimeter positional accuracies.
Another way to determine position is by utilizing an inertial measurement unit (IMU), which is an electronic device that measures and reports a platform’s specific force, angular rate, and sometimes the orientation of the platform, using a combination of accelerometers, gyroscopes, and (sometimes) magnetometers. The rate and quality of IMU observations vary depending on the type of IMU included in the MMS.
An IMU helps you know not only where you are, but how you got there and where you’re headed.
Micro-electro mechanical system (MEMS) IMUs are typically small enough to fit onto the mainboard of a computer, have a lower observation rate per second, and are less expensive. Fiber optic gyro (FOG) IMUs are larger, provide much higher observation rates, are more accurate, and are considerably more expensive.
Working together, a GNSS sensor and an IMU are a very effective combination in determining an accurate record of where we are and our movement through space. The GNSS determines a position, then the IMU “carries” that position throughout its observation rate (for example, 200 observations per second might be typical) to the next “check in” with the GNSS. These two sensors are constantly checking in with one another for position and heading.
This path through space, from one position to another, is called a trajectory. One can think of this as a string of connected x-y-z positions in space — a 3D breadcrumb trail, of sorts.
When
Creating this kind of 3D breadcrumb trail can be done independent of time, but tracking time allows us to understand the time scale between points. Thus, in an MMS, every point along the line has a time stamped onto it as well. Rather than a 3D line in space, the trajectory becomes a 4-dimensional line, letting us understand how long it took us to get from point to point, rather than simply putting the points in order chronologically. This information has a direct impact on LiDAR data, for example — it will expand and contract like a slinky as the MMS speed varies.
“In many applications, mobile mapping systems open opportunity to create deliverables that wouldn’t be possible at all, or would be extremely cost-prohibitive, using traditional means of data capture.”
What
It is certainly possible to create a mobile map with just the “where” and “when.” The implied “what” is general existence. You can create a map of where the system existed during a given time period. That can be useful — it’s essentially what exercise apps like Strava do. Yes, your fitness tracker may be a mobile mapping system!
Usually, however, we’re looking to capture more than simply “where” and “when” — we want to know “what” the environment was at that place and time. In the example of your fitness tracker, you might have a mobile heart-rate map, where you can see what your heart-rate was at each point along the route of your run. Or maybe the “what” is your speed at any given time and place.
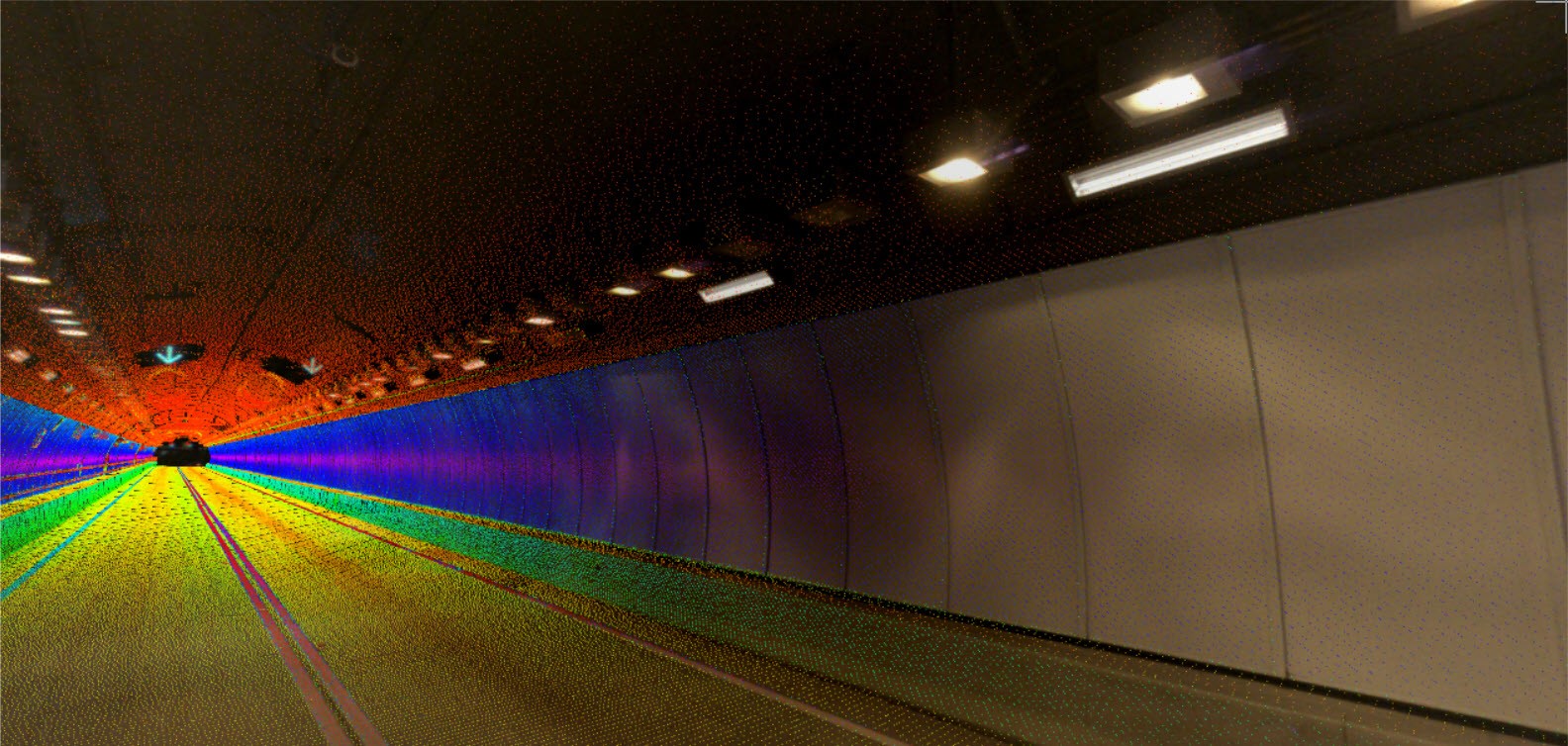
In a professional setting like the one we’re exploring here, the time stamp is the common link between the trajectory and the data from whatever external sensor or sensors you happen to be using: LiDAR, a frame camera or 360-degree spherical camera, ground-penetrating radar, etc. By knowing when we took an observation of any kind, we can drop them into place along the recorded trajectory.
Why Use a Mobile Mapping System?
As with any technology, you should evaluate the return on investment of using a mobile mapping system for any particular application vs. other methods.
Mobile laser scanning, for example, generally allows you to capture the 3D data much faster while keeping workers out of harm’s way. If the system can also deliver the required accuracy and allow you to produce the deliverable you need, the people hours you save along with the safety benefits can quickly make a mobile solution worth your while.
Generally, if the job would involve capturing data in a number of locations in order to create a large, detailed map, a mobile mapping system can provide great value by saving you time in setting up, breaking down, and moving to the next location. You’ll find added value if the job requires multiple readings in each location and you can identify a mobile mapping system that allows you to correlate sensor data.
For some jobs mobile mapping systems may be overkill. Most important is identifying the best method of data capture for the job at hand.
In many applications, however, mobile mapping systems open opportunity to create deliverables that wouldn’t be possible at all, or would be extremely cost-prohibitive, using traditional means of data capture. New technology means new possibilities for adding value, winning projects and growing your business.
To talk to me or one of our other experts and learn more about mobile mapping or other surveying solutions, please contact us.
———————————————————-
NOTE: The new Leica Pegasus TRK, launched in May 2022, brings even more opportunities for mobile mapping through its autonomy, intelligence and simplicity. Learn more about the Pegasus TRK here >
———————————————————-
About the Author:

For over 20 years Jason Ellis has been an agent of change by way of technology and a passionate advocate of all things geospatial. Every day he works to help organizations transform their potential by exploring and implementing mobile reality capture solutions. As the North American mobile mapping sales and technical consultant for Leica Geosystems, he works closely with collaborators who are driving reality capture and helping to shape the landscape of the industry. Follow Jason on LinkedIn.



